重新认识STM32
成功点亮第一颗LED灯后,我们可以重新来认识一下STM32,并问问自己,当学习STM32时,我们究竟要学些什么。
首先,STM32是一类Micro Controller Unit,他不仅集成了处理器、内存、闪存,还集成了诸多外设,包括基本GPIO、定时器TIM、USART串口、ADC模数转换器等等等等,这些外设通过总线与Arm核通信,接受处理器的控制。作为处理器运算时,STM32开发和传统C开发区别不大,我们需要特别学习的便是如何控制这些外设。
 ◎ stm32系统结构
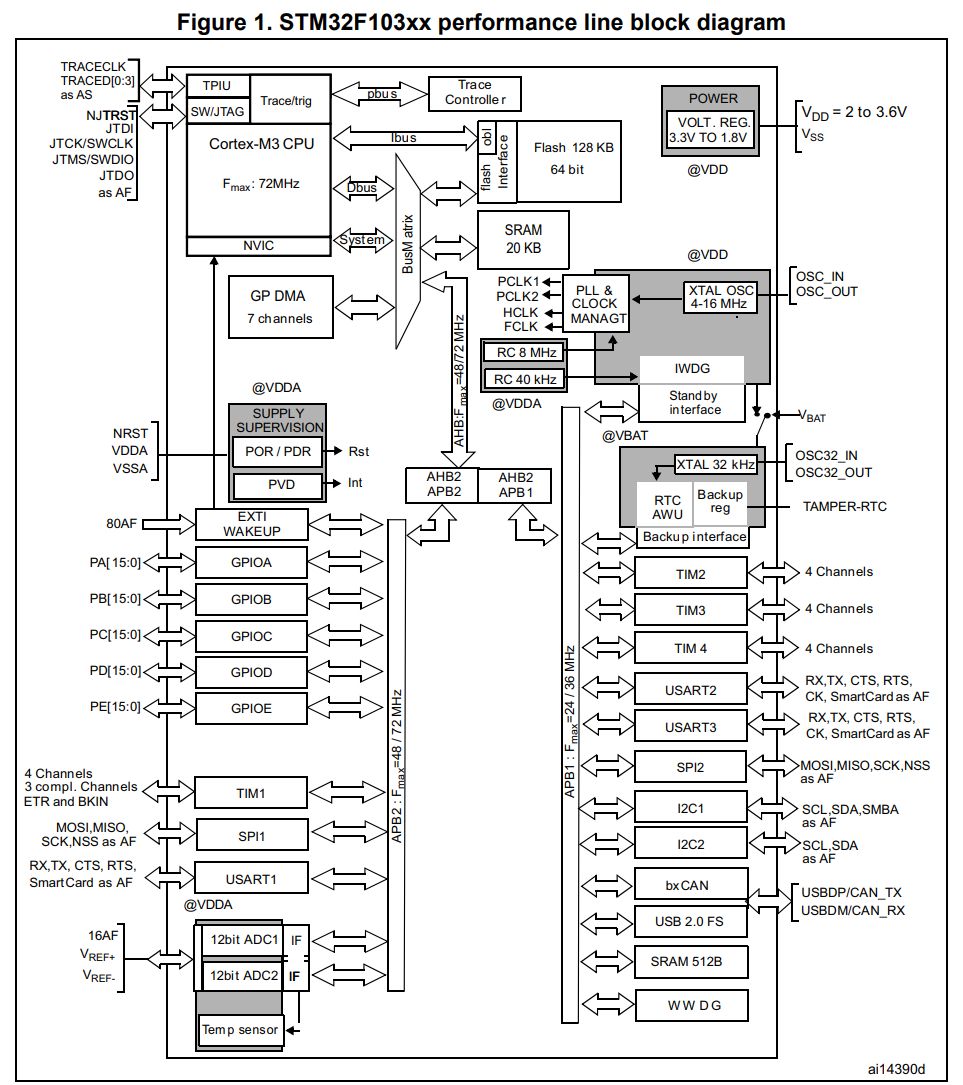
◎ stm32系统结构
STM32的外设多种多样,不过别担心,这张图只是让这些外设露一下脸,之后我们会逐一学习它们,我们现在只需要注意,外设究竟连接在哪条总线上,例如我们曾用到的GPIO均连接于APB2总线,而I2C接口则连接于APB1总线,APB2总线时钟频率高于APB1总线。
STM32最小系统
STM32最小系统是指让STM32芯片正常工作的必需电路结构,我们手中的开发板便是一个STM32最小系统,它通常包括电源、复位、时钟、启动与调试接口电路。
电源
STM32采用3.3V供电,一个STM32芯片中可能存在多个VCC引脚与GND引脚,在绘制电路图时每一个引脚都需要连接至电源或地,通常STM32的最大功耗在几十毫安量级,常见的供电形式有:
- 3.3V电池供电;
- USB供电(USB中电源为5V,需要额外的5V转3.3V芯片转换);
- SWD接口供电(SWD电源本身为3.3V,无需转换)。
为了提高ADC、DAC相关模拟电路的性能,该部分电路通过VDDA与VSSA两个引脚单独供电,可以通过磁珠或额外滤波电路将该部分供电与数字电源隔离开。
复位
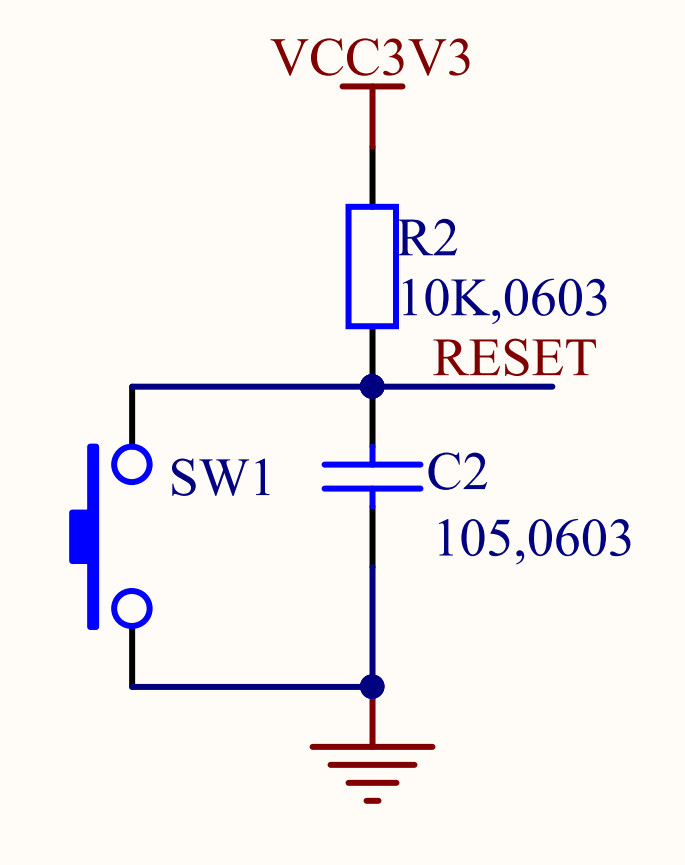
STM32的NRST引脚输入低电平时,STM32将进行硬件复位,复位电路通常由一个上拉电阻、一个大电容与一个开关组成,其包含有两套复位逻辑,其一是在上电时,由于电容需要充电,RESET处电压由低电平缓慢上升,最后到达高电平,这一过程无需干预,自动进行,称为上电复位;而当开关按下时,RESET电压被手动短路至低电平,这一过程称为硬件复位。
时钟
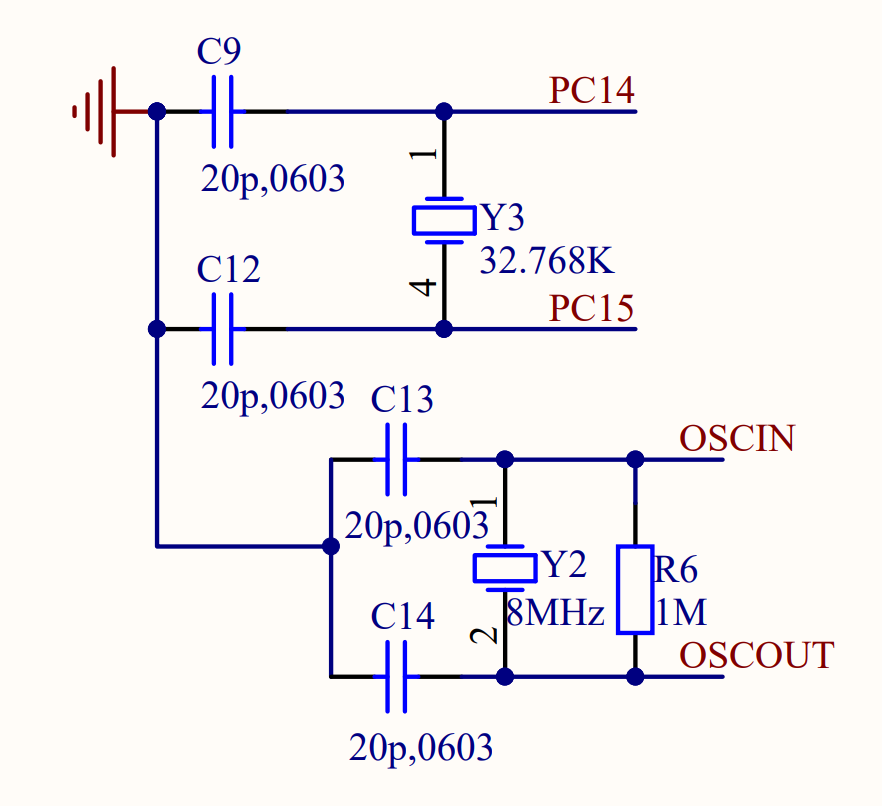
STM32所需的外部时钟既可以是有源时钟,也可以使用晶振提供,尽管有源时钟更为稳定,但出于成本和功耗的考虑,一般采用无源晶振的方式提供外部时钟,此时需要为晶振搭配合适的启动电容与反馈电容。STM32通常需要两个外部时钟:
- HSE时钟:一个4~16MHz高速时钟,通过PLL倍频后提供系统时钟(SYSCLK);
- LSE时钟,一个32.768kHz时钟,经过15次分频后可以得到1Hz计时脉冲,提供RTC时钟作为准确的时间基准。
启动
启动电路通过BOOT0与BOOT1两个引脚配置了STM32的启动模式:
- BOOT0为0时,STM32从Flash存储器的起始地址处启动,这种启动模式最为常见;
- BOOT0为1,BOOT1为0时,STM32从系统内存(也是Flash,但起始地址不同,类似于Bootloader)启动,通常在Flash内引导程序出现问题时,通过串口或其他接口加载新的引导程序;
- BOOT0为1,BOOT1为1时,从SRAM启动,由于SRAM断电后不再记录信息,因此该模式通常只适用于开发时的快速调试。
调试接口
STM32提供SWD和JTAG两种调试接口,其中SWD仅使用SWDCLK与SWDIO两个引脚,连接更为方便,而JTAG占用5个引脚,但在烧写调试外还提供了生产测试和配置的高级功能,对于简单开发而言,SWD接口已经十分够用了。
复位与时钟树
复位
STM32系统中存在三种复位:
- System reset:重置除时钟控制和备份区意外的所有寄存器,最常见的复位形式,上文中提到的复位电路出发的就是系统复位;
- Power reset:重置除备份区外所有寄存器,比System reset更为彻底,在重新上电或在退出standby低功耗模式时触发;
- Backup domain reset:仅针对与备份区的复位。
这里我们只需要简单了解系统复位触发的几个原因,其余内容将在我们使用到时再作介绍:
- NRST引脚被拉低,即按下了复位电路中的开关按钮;
- 软件触发,比如调试时的“重新运行”,就是通过调试接口向Arm核发出了系统复位指令;
- 看门狗触发;
- 低功耗模式触发,如进入了Standby或Stop模式。
时钟树
时钟相当于STM32的心跳,寄存器的置位复位、时序的控制均需要通过时钟触发,接下来我们以开发板上的STM32C8T6为例来认识STM32的时钟树,打开STM32CubeMX中的Clock Configuration页,结合此前的STM32系统结构图,我们可以直观的看到时钟树的各项配置以及各个模块使用的时钟。
 ◎ STM32时钟树
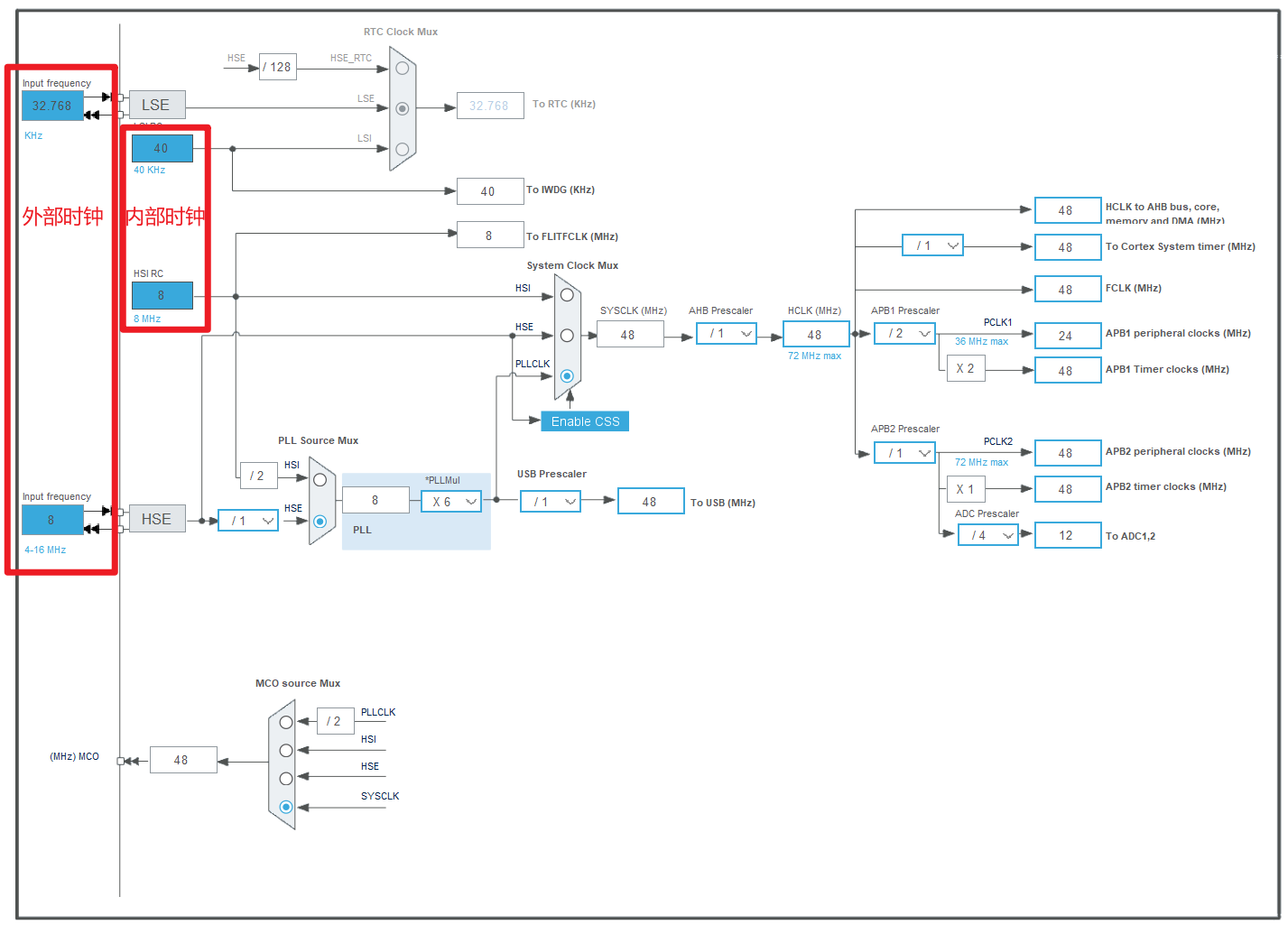
◎ STM32时钟树
可以注意到,除去我们在最小系统中提供的HSE(8MHz)与SLE(32.768kHz)两个外部时钟外,STM32还内嵌HSI(8MHz)与LSI(40kHz)两个内部时钟,可以通过图中的几个选择器为SYSCLK、RTC Clock选择合适的时钟源,这些配置本质上是向CLK相关寄存器种写入不同值来实现的,之后我们会更加深入的讲解如何通过库函数来配置时钟项。
从时钟树中我们注意到:
- 总线时钟分为外设时钟和定时器时钟,在总线连接的外设中,TIMx的时钟由Timer clocks提供,其余外设时钟均由peripheral clocks提供,同时ADC的时钟可以通过单独的ADC prescaler进行更为灵活的配置;
- 当使用USB功能时,USB所需时钟频率为48MHz,而输入HSE的最大频率为16MHz,必须开启PLL倍频以满足USB的时钟需求;
- 用于操作Flash存储器的FLITFCLK时钟只能由HSI控制,频率固定为8MHz;
- 独立看门狗IWDG的时钟只能由LSI提供,而窗口看门狗WWDG挂载在APB1总线上,由APB1 peripheral clocks提供时钟;
- 部分时钟的最高频率存在限制,例如APB1总线最高频率为36MHz,而APB2总线则为72MHz,在配置时需要考虑到这些限制,否则会出现时钟错误,这里推荐采用STM32CubeMX检查时钟配置的正确性。
在使用外设时,第一步始终是开启该外设的时钟,库函数中的相关函数为:
|
|
这三个函数分别控制了直连与AHB总线、连接于APB1总线、连接与APB2总线的外设时钟。
认识GPIO
从这里开始,本系列教程开始体现出较大的差异化,这是因为作者的主要学习方式并不是进行实验,而是通过阅读reference manual了解各个外设的基本原理、对应寄存器配置,并阅读库函数代码掌握如何调用接口配置这些外设,这是题目中“the hard way”最为重要的一步,官方提供的参考手册其实就是学习STM32的最好教材。
同时,本教程也会参考其他以实验为主的教程,适当插入一些必需的辅助知识,帮助你独立的实现对应环节的实验,对于其他教程出现的实验现象,你都可以先尝试自己实现,再参考教程提供的范例代码进行学习。
GPIO是微控制器对外交流的通道,几乎STM32的所有功能都需要通过GPIO实现,STM32上的GPIO提供4大类共计8种工作模式:
- 数字输入(浮动、上拉、下拉)
- 模拟输入
- 数字输出(开漏、推挽)
- 复用功能输出(开漏、推挽)
pull-up and pull-down
上拉电阻和下拉电阻在数字电路中非常常见,它们用于偏置引脚的输入,以防止它们在无输入时电平随机浮动。在无输入时(Switch断开情况下),加入上拉电阻,引脚会保持高电平,加入下拉电阻,因教会保持低电平,两者都不加,引脚处于浮动状态,输入电平的高低会随环境变化,无法预测。
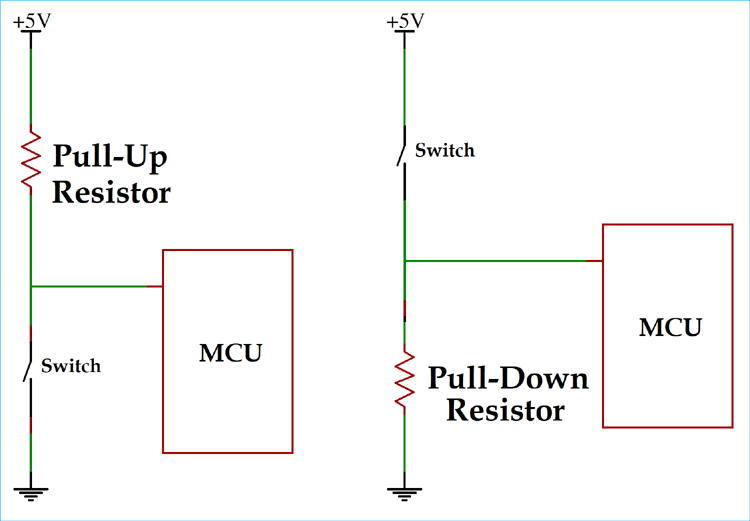
那么如何选择上下拉电阻的阻值呢?主要有两个考虑因素,一是开关断开时引脚的输入电压、二是开关闭合后电阻上的漏电流;上拉电阻越大,流入引脚的电流在电阻上形成的压降越大,会导致开关断开时引脚电压降低,偏离电源高电平;而上拉电阻学校,开关闭合时由高电平流向低电平的漏电流越大,会带来不必要的功耗和发热。经验公式为,其中 $V_{high(min)}$ 为高电平的最小电压,$V_{low(max)}$为低电平的最大电压,$I_{sink}$为最大输入电流:
$$ R_{pull-up}=\frac{V_{DD}-V_{high(min)}}{I_{sink}} $$
$$ R_{pull-down}=\frac{V_{low(max)}-V_{GND}}{I_{sink}} $$
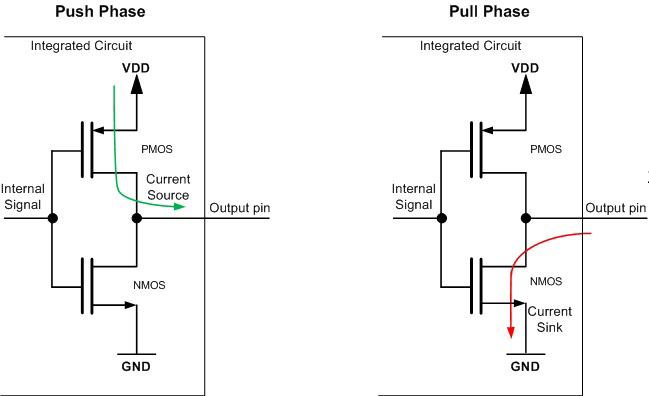
push-pull and open-drain
推挽输出和开漏输出是数字电路中的两种驱动形式。推挽输出的名字十分形象,当输出高电平时,Internal Signal为低电平,PMOS开启,NMOS关断,电流由VDD“推”向输出端口;而输出低电平时,Internal Signal为高电平,PMOS关断,NMOS开启,电流被“拉”回地;无论输出高低电平,输出引脚均有电流通过,信号上升下降速度快。
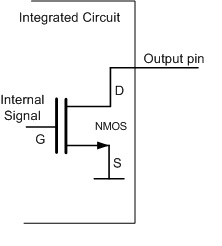
而开漏输出只使用一个NMOS实现,只能输出低电平,而当Internal Signal为低电平时,NMOS关断,输出引脚处于高阻态,因此若想驱动高电平,往往需要配合外部的上拉电阻使用,在这种情况下,输出信号上升时会受到上拉电阻的限流,上升沿斜率受到影响,通常开漏输出会有更高的功耗和更长的上升时间。
实际使用中,推挽输出多用于信号始终单向输出的场景(如SPI、UART等),而开漏输出则适用于同一信号线上连接多个输出设备的场景(如I2C等)。
GPIO原理
GPIO的基本结构如下图所示:
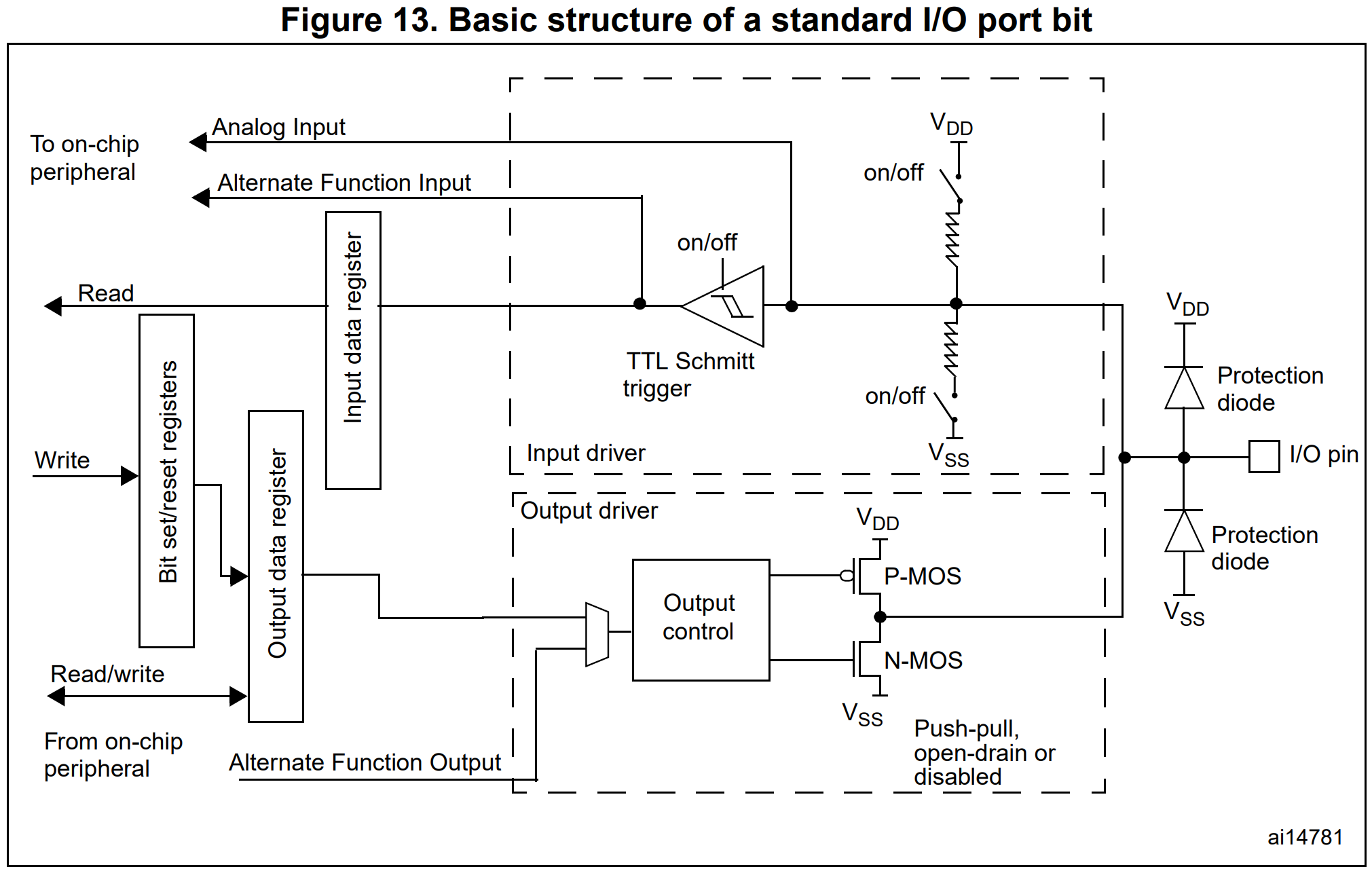 ◎ GPIO原理图
◎ GPIO原理图
在各模式下,该结构的通断情况为:
-
数字输入
关断Output,打开施密特触发器,根据配置连接上拉电阻和下拉电阻,Input data register在每个APB2总线时钟周期锁存一次来自施密特触发器的输入;
-
模拟输入
关断Output,关断施密特触发器,断开上拉电阻与下拉电阻,Input data register始终保持全0;
-
数字输出与复用输出
Output control工作在开漏模式或推挽模式,施密特触发器打开,上下拉电阻断开,Input data register在每个周期采样;
当GPIO处于输出状态时,数字输入照常工作,因此在推挽输出状态下,可以通过Input data register监控检验GPIO的实际输出情况。
STM32F10x的引脚通常只可输入0~3.3V的电压,但一些引脚在连接VDD的保护二极管处做了特殊设计,使之可以使用最高5V的输入电压,这些引脚在引脚图中会带有ft标注。
复用IO
复用IO(AFIO)是STM32中的一个重要概念,在标准数字输出模式下,输出控制信号来自Output data register,当改变寄存器值时,端口输出的电平值会同步发生变化,而复用输出则会切断输出寄存器的连接,将输出控制信号连接至复用该引脚的外设上,此时GPIO模式需要根据外设的要求进行更改,如果GPIO模式的配置不符合外设的需求,该外设可能会无法正常工作,具体各个外设需要的GPIO配置可查阅参考手册中“GPIO configurations for device peripherals”一节。
每个外设都有默认的复用PIN脚映射,当同时使用多个外设导致出现引脚冲突时,我们可以通过重映射(remap)来改别外设复用的PIN脚,例如当使用I2C1外设时,默认会占用PB6和PB7脚,经过重映射后,可以转为占用PB8和PB9脚,不过,所谓重映射不能随意指定服用的PIN脚,而是只能在几个配置中进行选择,管脚映射的具体列表可以查阅参考手册中的“Alternate function I/O and debug configuration”。
作为输入引脚时,GPIO也可以被复用,不过在复用时,Input data register仍可以读取到该引脚的值。
除外设的输入输出脚外,PIN脚还可以被复用为内部中断输入或事件输出。
GPIO库函数
现在我们来看看如何通过库函数配置GPIO吧,GPIO相关的库函数编写于"stm32f10x_gpio.h"中,其库函数大致可如下分类:
-
GPIO模式配置
1 2 3 4// 配置GPIO模式 void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct); // 恢复GPIO默认配置 void GPIO_DeInit(GPIO_TypeDef* GPIOx);此外,库函数中还提供了用于填写
GPIO_InitStruct的默认配置的函数,默认配置全部端口工作在浮动输入模式:1 2GPIO_InitTypeDef GPIO_InitStructure; GPIO_StructInit(&GPIO_InitStructure); -
读取GPIO输入(本质是读取Input data register)
1 2 3 4// 读取单个GPIO uint8_t GPIO_ReadInputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin); // 读取整排GPIO uint16_t GPIO_ReadInputData(GPIO_TypeDef* GPIOx); -
读取GPIO输出(本质是读取Output data register)
1 2 3 4// 读取单个GPIO uint8_t GPIO_ReadOutputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin); // 读取整排GPIO uint16_t GPIO_ReadOutputData(GPIO_TypeDef* GPIOx); -
设置GPIO输出
1 2 3 4 5 6 7 8// 置位,设置为高电平 void GPIO_SetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin); // 复位,设置为低电平 void GPIO_ResetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin); // 改变单个GPIO电平 void GPIO_WriteBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin, BitAction BitVal); // 整体写入GPIO void GPIO_Write(GPIO_TypeDef* GPIOx, uint16_t PortVal);其中,前三个对单个GPIO电平的操作是通过Bit set/reset registers实现的,而
GPIO_Write则是通过直接写入Output data register实现的; -
复用AFIO配置
1 2 3 4 5 6 7 8 9 10// 恢复所有AFIO配置,包括引脚重映射、事件线配置和外部中断配置 void GPIO_AFIODeInit(void); // 将arm核的eventout信号输出至指定引脚 void GPIO_EventOutputConfig(uint8_t GPIO_PortSource, uint8_t GPIO_PinSource); // 使能eventout信号输出 void GPIO_EventOutputCmd(FunctionalState NewState); // 配置管脚重映射 void GPIO_PinRemapConfig(uint32_t GPIO_Remap, FunctionalState NewState); // 将指定引脚作为外部中断,Pin x会被自动映射到EXTI x void GPIO_EXTILineConfig(uint8_t GPIO_PortSource, uint8_t GPIO_PinSource); -
锁定GPIO配置(锁定模式配置,而不是锁定输入输出值)
1void GPIO_PinLockConfig(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
GPIO的基本使用
还记得我们上一篇文章中是如何使用GPIO的么?让我们来回顾一下,当我们使用PA0做输出时,需要:
-
确保GPIOA时钟已被使能;
1RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); -
设置PA0为推挽输出或开漏输出,并指定刷新速率;
1 2 3 4 5GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure); -
改变PA0上的电平;
1 2 3GPIO_ResetBits(GPIOA, GPIO_Pin_0); GPIO_SetBits(GPIOA, GPIO_Pin_0); GPIO_WriteBit(GPIOA, GPIO_Pin_0, Bit_SET); -
最后,我们还可以检查一下PA0输出寄存器的值是否成功改变。
1assert(GPIO_ReadOutputDataBit(GPIOA, GPIO_Pin_0) == Bit_SET);
如何同时设置多个引脚?
我们可以使用按位或|连接多个引脚名称填写GPIO_Pin参数,例如:
|
|
这种操作在大部分函数中都是可行的,例如在GPIO_Init、GPIO_SetBits、GPIO_ResetBits中,你可以自由使用这种形式,而在GPIO_ReadInputDataBit和GPIO_ReadOutDataBit中,则不可以使用这种方式同时读取多个位的值,比较特殊的是GPIO_WriteBit函数,当你使用|同时改变多个引脚值时,会发现程序正常运行,但这是有隐患的,因为如果打开参数检查,会发现该函数只允许输入单个Pin脚(使用宏IS_GET_GPIO_PIN检查参数),检查错误会使程序直接跳入assert_failed的死循环中。
关注库函数效率
这里我们第一次讨论库函数的效率问题,以我们上文中提到的同时设置PA0、PA1高电平为例,查看GPIO_SetBits的实现:
|
|
首先该函数进行了参数检查,使用if语句遍历所有可选参数,判断参数是否合法,随后向BSRR寄存器中写入Pin脚值,这一操作虽然保证了寄存器值的合法性,是代码鲁棒性更高,但会引入不必要的运算开支;此外,每次该语句执行时,传入参数前都会进行一次按位与运算,这也会拖慢语句的执行速度。
当我们对自己的操作有足够的把握时,直接操作寄存器会比使用库函数拥有更高的效率,例如以下的B实现会比A实现拥有更高的效率,你可以使用示波器观察PA0上的电平变化频率来观察这一现象:
|
|
而将PA0作为输入时,操作类似:
-
确保GPIOA时钟已被使能;
1RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); -
设置PA0为输入,并选择浮动、上拉或下拉;
1 2 3 4 5GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure); -
读取PA0输入的电平;
1 2GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_0); GPIO_ReadInputData(GPIOA);
常用的GPIO操作就是这么简单,AFIO的操作我们会在后续文章中慢慢接触,现在让我们连接LED灯和按键开关,动手做做实验吧。
实验 Q&A
如何让程序暂停
也许在操作GPIO时,你也许希望LED灯亮一会、灭一会,如何让你的程序暂停一下呢,你也许会想到c语言中的sleep()函数,但很遗憾,arm gcc中没有实现这一函数,我们需要自己实现它,最简单的方式是写一个大循环,例如:
|
|
这种方式实现了一个最基础的延时,你可以调整循环的终止条件来定性改变延时长度,但你无法准确的控制具体延时了多长时间,更好的方式是通过Cortex-M3核中的SysTick计数器实现精确计时。你无法在STM32的参考手册或库函数中找到这一模块,因为他是在Cortex-M3核中实现的,你可以在Arm的文档中查找到与Systick配置相关的四个寄存器,它们在core_cm3.h头文件中的名称分别是:
-
SysTick->CTRL:控制和状态寄存器
- ENABLE:使能位,0为停用,1为启用,启用时计数器会首先读取Reload值,并开始递减,直至归零;
- TICKINT:设置计数器归零时的操作,0为不进行任何操作,仅通过COUNTFLAG指示计数完成,1为自动调用SysTick handler;
- CLKSOURCE:设置时钟源,0为外部时钟,1为内核时钟(也就是STM32中的系统时钟);
- COUNTFLAG:默认为0,计时器计数归零时变为1,一经读取则再次变为0;
-
SysTick->LOAD:重载值寄存器
- RELOAD:24位数据存储计数器的起始值;
-
SysTick->VAL:计数值寄存器
- CURRENT:24位数据存储计数器的当前值,可以读写;
-
SysTick->CALIB:校准寄存器,使用参考时钟校准计数器记录的时间
- TENMS:最接近10ms的计数值;
- SKEW:如果为1,则TENMS计数不是准确的10ms,而是最接近的值;
- NOREF:如果为1,则没有提供参考时钟,校准无效。
例如,如果我们的STM32系统时钟频率为72MHz,使用内核时钟作为时钟源,计数器每计72次,时间便过去了1us,可以据此编写如下函数,实现精准的延时:
|
|
由于该计数器为24位,因此最大计数值为$2^{24}-1$,最长定时为233016us,如果实现更长时间的延时,可以通过搭配循环实现,如:
|
|
为什么我不能使用PA15/PB3/PB4
这三个引脚在AFIO Remap中默认被JTAG调试接口占用,如果不需要JTAG功能,仅使用SWD调试,可以释放这些引脚作为通用GPIO使用,但需要注意,同时关闭JTAG和SWD是不推荐的,因为这样你将无法使用调试器接口烧写程序,需要通过切换启动模式才能够更换程序。
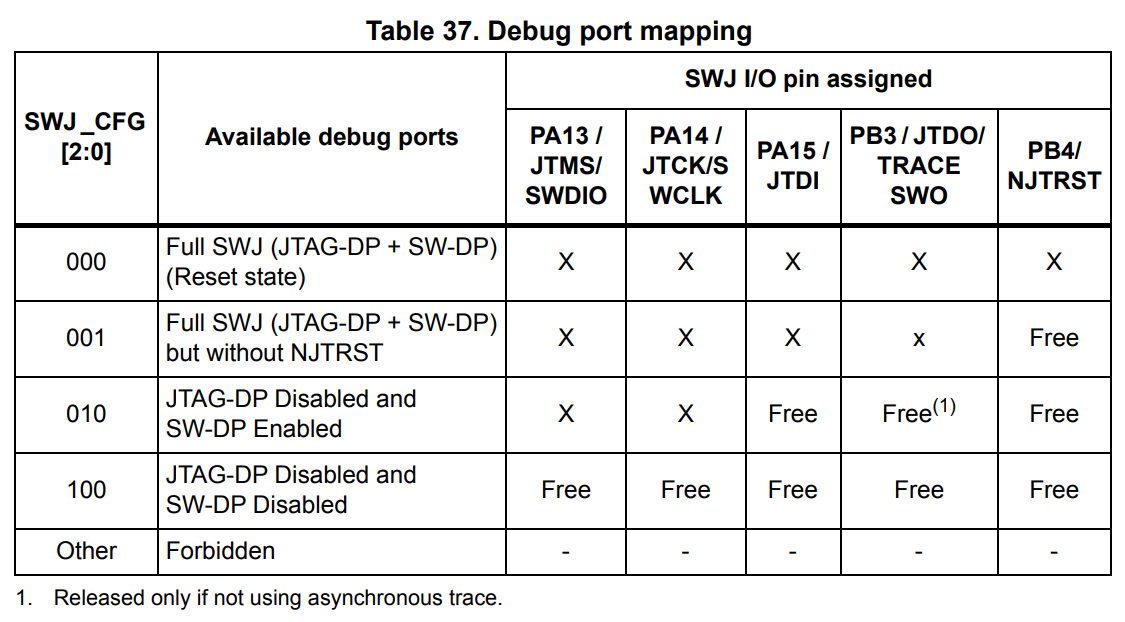
为使用PA15、PB3、PB4,可以先将AFIO外设中的SWJ_CFG置为010,即仅保留PA13、PA14作为调试口,随后便可对PA15、PB3、PB4进行正常的GPIO配置了:
|
|
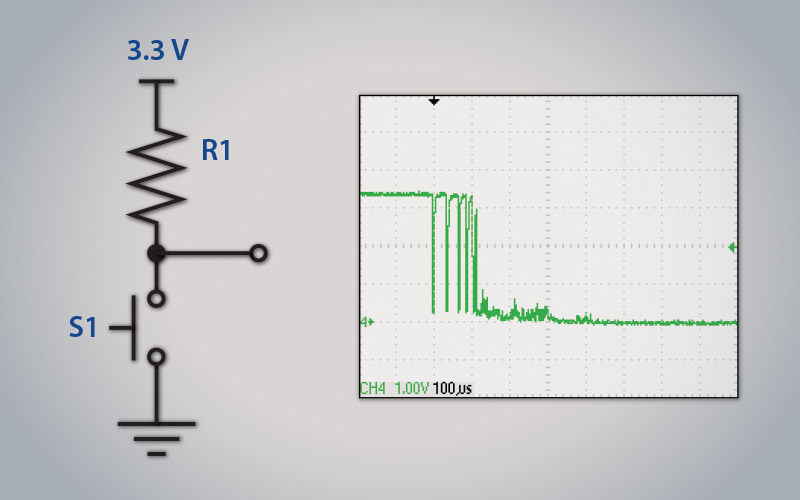
按键输入抖动怎么办
你也许曾尝试实现这样的一个程序,当按键按下时,LED灯点亮,再次按下,LED灯熄灭,如果你使用了类似下面这段的代码,你会发现按下按键的结果是不确定的,有时改变了LED的状态,而有时又不会:
|
|
你可能会认为这是STM32不够灵敏导致的,其实恰恰相反,尽管你只按下了一次按键,但由于金属片之间的贴合、分离需要一个过程,输入信号并不是理想的高低电平切换,而是经过一小段连续随机的抖动才会完成切换,这种现象被称为按键抖动(switch debouncing),而STM32的采样频率很高,可能会采集到这一抖动,误认为你多次按下了这个按键,因此LED的状态被切换了许多次。
有许多方法可以抑制按键抖动,首先是硬件消抖,可以利用RC低通滤波器+施密特触发器的组合,滤除高频抖动,这种消抖方式会损失一定的响应时间,并同时增加额外的功耗和成本,相比之下,软件防抖是一种更加快捷省事的方法。
软件防抖的思路是在每次电平切换后,会提供一个按键抖动的时间窗,在时间窗内会停止对输入的采样,等待一段时间,抖动消失后再重新进行输入判断;
例如:
|
|
经过实验测试,留有10ms时间窗的情况下,基本不会发生因抖动产生的误操作。不过在这种实现方式下,sleep延时函数会阻塞函数的运行,需要等待按键松开后才可以处理其他的事务,那么,是否会有更好的方式呢?当然有!不过需要借助中断实现,让我们熟悉中断以后再来学习吧。
小结
在这篇文章中,我们认识了STM32的时钟、总线与外设,并学习了最基本的外设GPIO,掌握这些知识后,我们已经可以完成包括LED、蜂鸣器、按键开关、光敏传感器等模块的实验。随后,我们将从AFIO出发,一步步学习其余的STM32外设。