系统环境
VirtualBox 6.1.4 & Ubuntu 16.04 LTS
配置网络环境
为加速github clone,先配置虚拟机网络使之使用主机代理
VirtualBox选用NAT模式后,若虚拟机ip地址为10.0.x.15,则宿主机ip为10.0.x.2
配置git代理
|
|
由于apt源可使用国内镜像,因此可不配置系统代理
安装ROS
参考官方文档
使用tuna镜像
|
|
配置ROS
初始化
|
|
环境配置
(需要注意这里使用的是zsh,如果使用其他命令行工具需要进行相应更改)
|
|
安装编译依赖
|
|
安装rpg_esim
-
安装编译工具
1sudo apt-get install ros-kinetic-catkin python-catkin-tools python-vcstool -
创建workspace
1 2 3mkdir -p ~/sim_ws/src && cd ~/sim_ws catkin init catkin config --extend /opt/ros/kinetic --cmake-args -DCMAKE_BUILD_TYPE=Release -
下载源码
1 2cd src/ git clone https://github.com/uzh-rpg/rpg_esim.git -
处理依赖
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16sudo apt install ros-kinetic-pcl-ros libglfw3 libglfw3-dev libglm-dev ros-kinetic-hector-trajectory-server vcs-import < rpg_esim/dependencies.yaml cd ze_oss touch imp_3rdparty_cuda_toolkit/CATKIN_IGNORE \ imp_app_pangolin_example/CATKIN_IGNORE \ imp_benchmark_aligned_allocator/CATKIN_IGNORE \ imp_bridge_pangolin/CATKIN_IGNORE \ imp_cu_core/CATKIN_IGNORE \ imp_cu_correspondence/CATKIN_IGNORE \ imp_cu_imgproc/CATKIN_IGNORE \ imp_ros_rof_denoising/CATKIN_IGNORE \ imp_tools_cmd/CATKIN_IGNORE \ ze_data_provider/CATKIN_IGNORE \ ze_geometry/CATKIN_IGNORE \ ze_imu/CATKIN_IGNORE \ ze_trajectory_analysis/CATKIN_IGNORE如果在这一步出现无法git clone的错误,请检查是否正确配置git私钥
-
开始编译
1catkin build esim_ros -
编译成功后为模拟器配置环境变量
1 2echo "alias ssim='source ~/sim_ws/devel/setup.zsh'" >> ~/.zshrc source ~/.zshrc
测试模拟器
-
获取视频源
这里给出一些常用的命令以帮助使用
-
下载视频
1 2you-get -i 'https://youtube.com/watch?v=xxx' you-get -o /path/to/dir -O save_name --itag=18 'https://youtube.com/watch?v=xxx' -
剪辑视频
1ffmpeg -ss 00:00:00 -t 00:00:00 -i input_file output_file -
调整分辨率
1ffmpeg -i input_file -vf scale=640:-1 output_file -
调整帧率
1ffmpeg -i input_file -filter:v fps=fps=30 output_file -
拆分帧图像
1ffmpeg -i input_file out_dir/frames_%10d.jpg
-
-
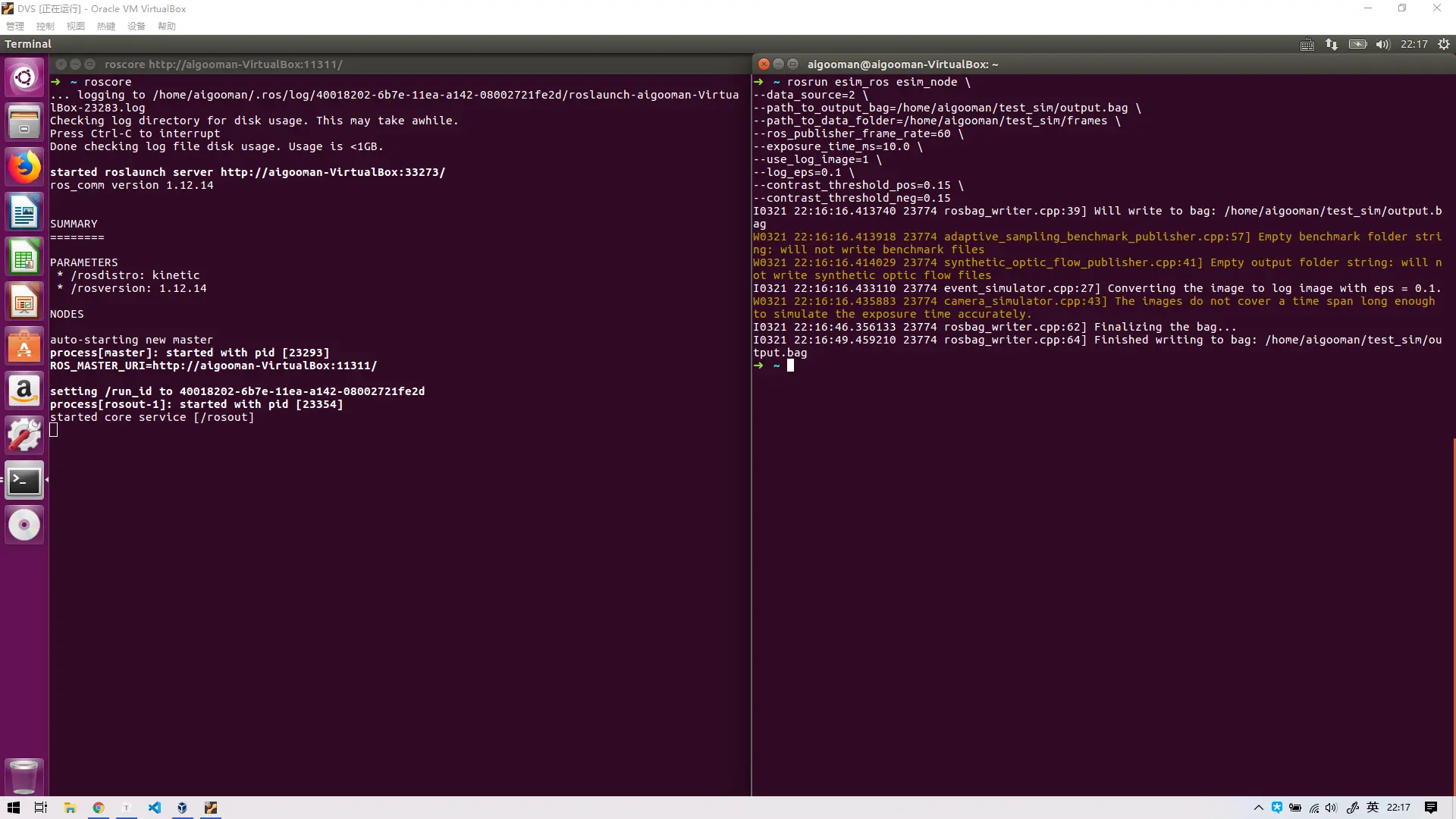
运行模拟器
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18#terminal 1 roscore #terminal 2 ssim roscd esim_ros python scripts/generate_stamps_file.py -i /path/to/frames -r 60 rosrun esim_ros esim_node \ --data_source=2 \ --path_to_output_bag=/path/to/out.bag \ --path_to_data_folder=/path/to/frames \ --ros_publisher_frame_rate=60 \ --exposure_time_ms=10.0 \ --use_log_image=1 \ --log_eps=0.1 \ --contrast_threshold_pos=0.15 \ --contrast_threshold_neg=0.15这里对一些用到的参数进行说明
-r 60:源视频帧率--ros_publisher_frame_rate=60:输出DVS数据帧率--exposure_time_ms=10.0:DVS曝光时间--contrast_threshold_*=0.15:对比度阈值,阈值高对应灵敏度低事件数少
注意这里输入的路径必须为完整的绝对路径,不可使用环境变量(如
~/、./)运行示例
-
可视化
1 2 3 4 5 6 7 8 9 10 11 12#terminal 1 roscore #terminal 2 ssim rosrun dvs_renderer dvs_renderer events:=/cam0/events #terminal 3 rosbag play /path/to/out.bag -l -r 0.1 #terminal 4 rqt_image_view /dvs_rendering-r 0.1为播放速率效果如下

数据解包
由于模拟器输出的文件格式为rosbag格式,需要特殊方式读出,这里使用rospkg自带的Python API解包
首先查看包中的信息
topics: /cam0/camera_info 1 msg : sensor_msgs/CameraInfo
/cam0/events 49 msgs @ 20.0 Hz : dvs_msgs/EventArray
/cam0/image_corrupted 49 msgs @ 20.0 Hz : sensor_msgs/Image
/cam0/image_raw 50 msgs @ 20.0 Hz : sensor_msgs/Image
我们这里主要关注/cam0/events,查看其对应类型dvs_msgs/EventArray
std_msgs/Header header
uint32 seq
time stamp
string frame_id
uint32 height
uint32 width
dvs_msgs/Event[] events
uint16 x
uint16 y
time ts
bool polarity
接下来将单msg信息整理至文本文件中,这里使用csv格式
注意rosbag包仅支持python2版本
|
|
其文件格式为
width, height
event1_t, event1_x, event1_y, event1_polarity
event2_t, event2_x, event2_y, event2_polarity
注意事项
- 尽量选择高帧率的视频,当采样频率大于源视频帧率时,模拟效果很差
- 尽量选择无转场的视频,当视频出现转场时,会出现全屏事件点影响数据
脚本
(由于本人的sh语法处于现学现用的状态,以下内容仅供参考
run_sim.sh
|
|
使用方法
|
|
run_view.sh
|
|
使用方法
|
|
配置ssh私钥
由于vcs默认以ssh方式访问github repo,因此需要私钥以获得[email protected]访问权
|
|
将得到的公钥添加至github即可